Markovkedja
Från Rilpedia




En Markovkedja är inom matematiken en tidsdiskret stokastisk process med Markovegenskapen, det vill säga att processens förlopp kan bestämmas utifrån dess befintliga tillstånd utan kännedom om det förflutna. En Markovkedja som är tidskontinuerlig kallas en Markovprocess.
En Markovkedja som antar ändligt många värden kan representeras av en övergångsmatris. Givet en sannolikhetsvektor, erhålles sannolikhetsvektorn för nästa steg i kedjan av multiplikation med övergångsmatrisen. Flera steg kan beräknas genom exponentiering av övergångsmatrisen. Det är även möjligt att beräkna processens stationära fördelning, det vill säga vad som händer då processen fortsätter i oändligheten, med hjälp av egenvektorer.
Markovkedjor har många tillämpningsområden, bland annat för att beskriva befolkningsprocesser och inom bioinformatik. Resultaten som ligger till grund för teorin om Markovkedjor framlades 1906 av Andrei Markov.
Innehåll |
Matematisk modell
Tillstånd och övergångar
Antag att den process vi vill beskriva kan anta n olika tillstånd, L1, L2, ... Ln. Vi anger sannolikheten för dess tillstånd vid tidpunkten t i form av en kolumnvektor med n element:
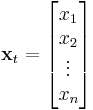
Elementet xn är ett tal mellan 0 och 1 som beskriver sannolikheten för att processen befinner sig i tillståndet Ln. Summan av alla element är 1. Om vi med säkerhet vet att processen vid tiden t befinner sig i tillståndet Lk, är xk = 1 och övriga element 0.
Att processen är stokastisk med Markovegenskapen innebär att vi för varje tillstånd kan ange sannolikheten för att processen ska hoppa till varje annat tillstånd. Sannolikheterna för de enskilda fallen kan ställas upp i en övergångsmatris, som är en kvadratisk matris med dimensionen n × n. Om vi här låter x → y beteckna sannolikheten för en övergång från tillståndet Lx till Ly, har övergångsmatrisen P följande form:
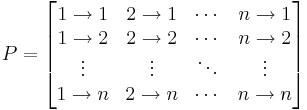
Precis som i en sannolikhetsvektor, är alla element i övergångsmatrisen reella tal mellan 0 och 1, och summan längs en kolumn måste vara 1 (eftersom den totala sannolikheten av varje möjligt utfall av en övergång är 1). Värdena längs diagonalen anger sannolikheterna för att ingen förändring sker under ett steg.
Vi kan nu beräkna sannolikhetsvektorn för tidpunkten t+1 genom att multiplicera sannolikhetsvektorn för tidpunkten t med övergångsmatrisen (observera att operandernas ordning spelar roll, eftersom matrismultiplikation inte är kommutativ):

Genom att upprepa multiplikationen kan nästföljande sannolikhetsvektor bestämmas. Tillståndet för en tidpunkt t+n godtycklig långt in i framtiden kan beräknas genom att multiplicera xt med matrisens n:te potens:

Stationär fördelning
Låt (X0, X1, …) vara en Markovkedja med tillstånden {s1, …, sk} och övergångsmatrisen P. En radvektor π = (π1, …, πk) sägs vara en stationär fördelning för Markovkedjan om den uppfyller dels att var och en av π1, …, πk är större än eller lika med 0, dels att summan av talen π1, …, πk är lika med 1 och slutligen att produkten av radvektorn π med övergångsmatrisen P utfaller i π, dvs. π • P = π.
Exempel

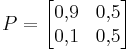
Betrakta följande mycket enkla stokastiska modell för att beskriva vädret:
- Det finns två olika tillstånd: antingen skiner solen, eller så regnar det. Vi betraktar vädret en dag i taget.
- Om solen skiner är det 90% sannolikt att det blir vackert väder också nästa dag.
- Om det regnar är det 50% sannolikt att det fortsätter regna dagen efter.
Modellen beskrivs av följande övergångsmatris:
Om vi vet att solen skiner under dag 0 (med andra ord att sannolikheten för att solen skiner är 100%, respektive 0% för att det regnar) representeras tillståndet för denna dag av sannolikhetsvektorn

Nu kan det sannolika vädret under dag 1 beräknas genom

och sannolikheten är alltså 90% att solen skiner även den dagen. På samma sätt kan vädret under dag 2 förutspås genom

Övergångsmatrisen har egenvektorn (normaliserad så att summan av elementen är 1)

med tolkningen att 83% av alla dagar i det långa loppet har vackert väder.
Tillämpningar
Teorin om Markovkedjor kan tillämpas i bland annat vid design av webbplatser. I så fall antas sannolikheten att användaren besöker en webbsida bara bero på vilken sida användaren ser just nu. Genom att statisktiskt uppskatta dessa sannolikheter går det att öka användbarheten av webbsidan.