Radar
Från Rilpedia




- För andra betydelser, se Radar (olika betydelser).
Radar (akronym från engelskans Radio Detection and Ranging men också palindrom som "reflekterar" radarns verkningssätt) betyder upptäckt och avståndsbestämning med radiovågor. Det var US Navy som myntade förkortningen radar 1942. I radarns "hemland" England användes radiolocation eller förkortningen RDF - Radio Detection Finding. Tyskarna använde ordet Funkmess. I radarteknikens barndom förekom den svenska termen ekoradio, men det fick aldrig brett genomslag. I Sverige började ordet radar brukas 1946.
Radar använder kortvågiga radiovågor, det vill säga elektromagnetisk strålning, för att identifiera avstånd, höjd och eventuell färdriktning för olika föremål. En signal skickas ut, reflekteras och detekteras av avsändaren. Radar har idag en omfattande såväl civil som militär användning.
Innehåll |
Historia

Den första radarliknande konstruktionen patenterades av den tyske ingenjören Christian Hülsmeyer redan 1904. Hans så kallade "Telemobiloskop" var främst avsett att undvika kollisioner mellan fartyg och annat i nedsatt sikt. Grunden till den moderna, och i dag mycket effektiva, radartekniken lades 1935, då den skotske fysikern Robert Watson-Watt konstruerade en anläggning där elektromagnetiska radiovågor reflekterades från fasta förmål och åstadkom ett eko som avbildades på en bildskärm. Militären drog nytta av upptäckten och bedrev i hemlighet utvecklingsarbete för att förbättra anordningens effektivitet. Man byggde skyndsamt upp en kedja av radarstationer längs den engelska sydkusten, Chain Home Radar. De första primitiva radaranläggningarna arbetade med frekvenser inom kortvågsområdet på 20 – 30 megahertz.
De brittiska bombningarna av tyska mål visade sig snart ha en mycket låg träffprocent – omkring tio procent. Planen behövde ett system som kunde hjälpa navigatören att finna målet med bättre säkerhet. Ursprungligen gjordes detta genom att leda planen med radiovågor som sändes från flera sändare, och där man letade efter den plats där radiosignalerna korsade varandra. Även den modellen hade alltför låg precision och man behövde en radaranläggning som var tillräckligt liten för att bäras av ett flygplan.
Problemet var främst att man inte kunde skapa kombinationen av hög frekvens och hög effekt, men detta löstes då man vid universitetet i Birmingham lyckades konstruera en magnetron med hålrumsresonatorer som skapar mikrovågor med en längd som är mindre än tio centimeter (mer än tre gigaherz); ju kortare våglängd desto högre precision uppnås. Magnetronen blev sedan huvudkomponenten i det som idag kallas radaranläggning.
Nazityskland hade också kommit en bit på väg med liknande system, kallat Peilfunk som betyder ungefär "pejlradio", men man låg efter britterna med tekniken. Telefunken var den ledande tillverkaren.
Till Sverige kom radarn under 1940-talet, men kallades här "ekoradio", vilket är ett bra ord för att beskriva funktionsprincipen. För att underlätta kommunikationen med andra länder övergick man snart till den internationellt vedertagna benämningen radar.
Radar arbetar i regel inom frekvensintervallet mellan 1 och 40 GHz. Det vanligaste frekvensområdet för radar är det som brukar kallas X-bandet och ligger mellan 8 och 12 GHz vilket ger en våglängd på omkring 3 cm. Det är främst fartygsradar för navigering som ligger i det intervallet. Även S-band med 10 cm våglängd är vanlig till sjöss, och obligatorisk på större fartyg. Den är exempelvis speciellt bra på att visa råkar i is. Militär och civil spaningsradar för till exempel luftövervakning har ofta större våglängd. Det beror bl.a. på att atmosfärsdämpningen ökar markant vid omkring 11 GHz vilket är olämpligt om man vill ha stora räckvidder.
Driver man upp frekvensen ännu högre kan man få reflexer från nederbörd och inversioner i atmosfären. Typisk frekvens för väderradar är 14 GHz. Man har även lyckats ta radarbilder av solen. Det stora avståndet innebär att måste man vänta drygt femton minuter på den reflekterade signalen (ekot).
Idag

Radar har numera fått ett mycket brett användningsområde utöver användning för övervakning av luftrummet och fartygstrafiken. Alla större fartyg har idag egen fartygsradar och detsamma gäller flygplan. Även inom meteorologin är bruket av väderradar ett mycket viktigt hjälpmedel.
Man arbetar för tillfället på NASA med att utveckla en radaranläggning som ska kunna upptäcka föremål utanför solsystemet. Detta är extrem långdistansradar, som kräver synnerligen kraftiga sändare och högkänsliga mottagare. Kostnaderna blir mycket stora och det rör sig bara om någon enstaka anläggning på hela jorden. Val av arbetsfrekvens blir en kontroversiell fråga med mycket s k lobbyarbete inom Internationella Teleunionen (ITU). Å ena sidan måste frekvensen vara tekniskt lämplig för ändamålet, och å andra sidan får andra radiotjänster inte störas.
Den andra ytterligheten föreligger vid kollisionsvarnare, som kan arbeta med kort räckvidd och måttligt känsliga mottagare. Bilindustrin har under flera år experimenterat med att bygga in radar i bilar för att öka säkerheten genom automatisk inbromsning i kösituationer. En variant är en anordning som varnar föraren för föremål som är i vägen vid backning av fordon. Där behövs bara få meters räckvidd. I kontrast med den galaktiska radarn blir det här fråga om massfabrikation med krav på låga priser på den färdiga produkten.
Även inom det aeronautiska området arbetar man med radar som ska förebygga kollision mellan luftfarkoster i närheten av varandra. Här rör det sig om räckviddkrav om ett fåtal km och en mellannivå på acceptabla kostnader.
Principer
Radarekvationen
Effekten Pr som återreflekteras till mottagarantennen ges av radarekvationen:
Här är
- Pt = utsänd effekt
- Gt = Förstärkning i sändarantennen
- Ar = effektiv area för den mottagarantennen
- σ = Radarmålyta för målet
- F = Vågutbredningsfaktor
- Rt = avstånd från sändaren till målet
- Rr = avstånd från målet till mottagaren.
I normalfallet, när sändare och mottagare finns på samma plats, förenklas ekvationen eftersom Rt = Rr = R är ett och samma avstånd. Ekvationen blir:
Antenntyper

- Den antenntyp, som illustreras av bilden ovan, bygger på en paraboloid-reflektor (ofta felaktigt kallad parabol). Denna typ har ett cirkulärt känslighetsområde med en rymdvinkel på någon enstaka grad och lämpar sig bäst för fast inriktning. Ju större reflektorn är (uttryckt i våglängder av arbetsfrekvensen), desto smalare blir känslighetsområdet, d v s antennens riktverkan är stor åt alla håll.
- Vid spaningsradar utgörs reflektorn av en parabolisk cylinderyta. Om cylinderaxeln är vertikal blir känslighetsområdet en vertikal skiva, som ger stark riktverkan i sida (azimutplanet) men låg riktverkan i höjdvinkel (elevationsplanet). Detta innebär att man med stor precision kan bestämma det väderstreck som ett mål ligger i, t ex ett flygplan, men man får eko oberoende av flyghöjden. Denna typ radarantenn roterar kring en vertikal axel med en hastighet på storleksordningen 10 varv/minut.
- Om i stället cylinderaxeln läggs horisontellt blir riktverkan hög i elevationsplanet, men låg i azimutplanet. Med denna antenntyp, som kallas nickande (horisontell vridningsaxel), kan man bestämma elevationen till målet med hög precision samtidigt som det är förhållandevis okritiskt med den exakta kompassriktning man "tittar" i.
- På fartyg är idag antenner av typ SWG-scanner (Slotted waveguide) så gott som allenarådande. Där leds vågledaren från sändaren in längs med antennspegeln och ligger alltså med sidan mot sändningsriktningen. En rad av öppningar i ledaren släpper ut effekten, och öppningarnas storlek och avstånd sinsemellan i förhållande till sändarens våglängd bestämmer med stor precision strålens riktning. Ju längre antennen är, desto smalare blir strålknippet, den sk lobbredden. En tolvfots antenn till en S-bands radar ger en vinkelnoggrannhet på under 1° medan en liten fritidsbåtsradar har en lobbredd på flera grader, vilket får till följd att ekon flyter ihop. Skillnaden i pris mellan dessa olika radaranläggningar är enorm.
-
Phased array-antenner består av ett antal mindre antenner, var och en med sin egen förstärkare. Genom att fasförskjuta signalerna kan radarstrålen riktas utan att själva antennen rör sig. Phased array-antenner gör det möjligt att mycket snabbt rikta om radarloben och att variera lobens bredd och orientering.
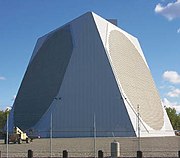 Phased array-antenn till ett robotvarningssystem i Alaska
Phased array-antenn till ett robotvarningssystem i Alaska
Litteratur
- Gunnar Dahllöf: Teknikkriget, som förändrade världen (Svenskt Militärhistoriskt Bibliotek). ISBN 91-974056-0-4
- Sven Scheiderbauer: Uppbyggnaden av flygvapnets första radarsystem 1944 - 1953 (Militärhistorisk Tidskrift 1981)
Se även
Externa länkar
 Wikimedia Commons har media som rör Radar
Wikimedia Commons har media som rör Radar