Kavaljersperspektiv
Från Rilpedia




Kavaljersperspektiv, också kallat kavaljersprojektion eller högpunktsvy, är ett sätt att avbilda ett tredimensionellt objekt på en platt ritning, och mer specifikt, en typ av snedprojektion.

En punkt i objektet representeras av tre koordinater, x, y och z. På ritningen representeras den bara av två koordinater, x" och y".
På den platta ritningen är de två axlarna, x och z i figuren, rätvinkliga och längden på axlarna ritas i skala 1:1; på så sätt är det lika den dimetriska projektionen, även om det inte är en ortografisk projektion, eftersom den tredje axeln, här y, ritas diagonalt, och bildar en godtycklig vinkel med "x"-axeln, vanligen 30 eller 45°. Längden på den tredje axeln är inte skalad[1][2].
Detta perspektiv försöker inte att ge en illusion av vad som kan ses, utan försöker bara ge information om djupet.
Det är väldigt lätt att teckna, speciellt med penna och papper. Det används därför ofta när en figur måste ritas för hand, till exempel på svarta tavlan under en lektion eller ett muntligt förhör.
Avbildningsmetoden användes ursprungligen för militära befästningar. På franska betyder "kavaljer" (bokstavligen "ryttare", se kavalleri) en konstgjord höjdpunkt bakom murarna som tillåter att man ser fienden över murarna [3]. Kavaljersperspektivet var hur sakerna såg ut från från denna höga punkt. Några förklarar också namnet genom att det var det sätt som en ryttare kunde se ett litet objekt på marken från hästryggen.[4].

Matematiska betraktelser
Om planet som vetter mot läsaren är xz och den försvinnande riktningen är y-axeln och vinkeln är α, då representeras en punkt i rymden med koordinaterna (x, y, z) och koordinaterna (x", y") i den plana figuren av:
- x" = x + cos α·y ;
- y" = z + sin α·y.
Transformationsmatrisen är
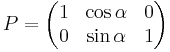
Till exempel, för en vinkel av 30° och en skalfaktor 0,7:
- x" = x + 0,35·y ;
- y" = z + 0,61·y ;
och för en vinkel av 45° och en skalfaktor 0,5:
- x" = x + 0,35·y ;
- y" = z + 0,35·y ;
Källor och fotnoter
- Denna artikel är helt eller delvis baserad på material från engelskspråkiga Wikipedia, Cavalier perspective, 25 augusti 2008.
- ↑ Illustrator Draftsman 3 & 2 - Volume 2 Standard Practices and Theory, page 67 from http://www.tpub.com
- ↑ Ingrid Carlbom, Joseph Paciorek, Planar Geometric Projections and Viewing Transformations, ACM Computing Surveys (CSUR), v.10 n.4, p.465-502, Dec. 1978 (engelska)
- ↑ Etymologie des maths, letter C (franska)
- ↑ DES QUESTIONS D’ORIGINES (franska)
Mer läsning
- Foley, James (1997). Computer Graphics. Boston: Addison-Wesley. ISBN 0201848406.